ジップマスタ®

- ジップチェーンを採用した片持式電動リフタ
- ・高速運転
最大1000mm/s(60m/min)の高速昇降が可能です。 - ・高頻度運転
多点停止でも高頻度運転が可能です。 - ・長寿命
昇降100万往復の長寿命を実現し、メンテナンスも容易です。 - ・高揚程
標準2m以上の長ストロークも対応できます。
ジップチェーンとは?
- 高速・高頻度運転
- 多点停止機能
- ダントツの省スペース
ジップチェーンとは、2本のチェーンがジッパーのように噛み合い、1本の強固な柱状になり「押し・引き」ができる当社独自開発のチェーンです。
つばきジップチェーンアクチュエータは、このチェーンを使った直線作動機として製品化したものです。
従来の空圧・油圧シリンダに比べ、省スペース、高速・高頻度運転、多点停止機能、高停止精度、取付方向自由など、環境配慮点を含め多くの特徴を有し、小形アクチュエータから大形リフタまで幅広く使用されています。




動画コンテンツ
つばき ジップマスタZMEシリーズ
特長
他の駆動方式を圧倒する高速・高頻度運転
連続運転が可能なジップチェーンの採用で、他の方式を凌駕する高速・高頻度運転を可能にします。
- ・高速:最大1000mm/s
- ・高頻度:300往復/時も可
- ・長寿命:昇降100万往復以上
長ストロークでも剛性に優れた自立形
コンパクトでも剛性の高い支柱を採用。リニアガイドを内蔵しているため、長ストロークでもオーバーハングロードに耐える構造です。
- ・高揚程:2000mm以上も対応可能
- ・高剛性:リフトマスタと同じリニアガイドを採用

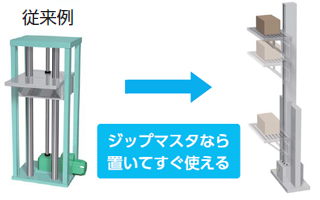
「置きポン形」のかんたん設置で組立工数削減
ジップチェーン、リニアガイド、モータを一体化した「置きポン形」
設計、組立工数のかかる従来の昇降機と違い、ジップマスタなら置くだけで使えます。
* 垂直搬送機としても使えます。
多点停止・多段位置決めを実現
ジップマスタは制御構成が簡単なため、多点停止・多段位置決めが容易に実現できます。
構造と他方式との比較
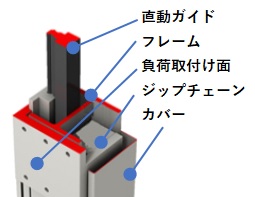
■ 独自の内部構造
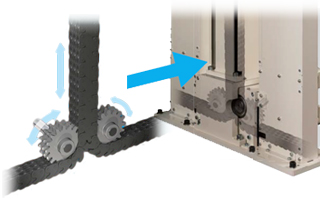
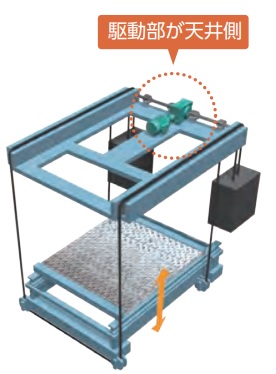
ドロップリフタとの比較
従来の垂直搬送リフタは現場での装置組み立てが必要な上、駆動部の設置や点検のために、天井側に足場を設けなければなりません。
ジップマスタは一体形 構造なので、装置組み立て・設置がラク。また 駆動部が床面側に配置されているため点検やメンテナンス作業は安全・容易です。
仕様
- ・昇降荷重:1.96kN~9.80kN
- ・ストローク:1,500mm/2,000mm
- ・速度:330~1,000mm/s(19.8~60m/min)
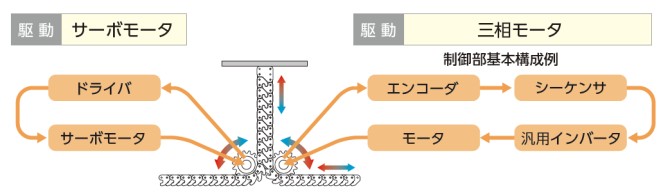
- ・駆動部:三相モータ付/サーボモータ付
カタログ・取扱説明書
形番表示
| ZME | L | 0500 | H | 20 | G | E |
| | | ジップマスタ |
| | リニアガイド方式 |
| 昇降荷重 0200:1.96kN{200kgf} 0500:4.90kN{500kgf} 1000:9.80kN{1000kgf} |
| 速度 M、H、U 速度は下記 製品形番一覧を 参照ください。 |
| ストローク 15:1500mm 20:2000mm |
| 駆動部 G:三相モータ付 K:サーボモータ付 |
| オプション 詳細は下記参照 |
■つばき形番ナビ
使用しているネジの種類です。
昇降荷重
規定の重心位置にて昇降可能な荷重です。
速度
昇降速度を表す記号です。
各機種の速度値は詳細情報をご参照ください。
ストローク
昇降できる距離です。
駆動部
G:三相モータ付きです。
K:サーボモータ付きです。
オプション記号
L1:位置検出センサを1個追加します。
V:電源の電圧が倍電圧となります。
E:モータ後部にロータリーエンコーダを装着します。
製品形番一覧
※形番クリックで詳細情報を表示します。
| 昇降荷重 kN{kgf} |
ストローク mm |
駆動部 | 速度 M (19.8m/min) |
速度 H (48m/min) |
速度 U (60m/min) |
|---|---|---|---|---|---|
| 1.96 {200} | 1500 | G(三相モータ付) | --- | --- | ZMEL0200U15G |
| 2000 | --- | --- | ZMEL0200U20G | ||
| 4.90 {500} | 1500 | --- | ZMEL0500H15G | --- | |
| 2000 | --- | ZMEL0500H20G | --- | ||
| 9.80 {1000} | 1500 | ZMEL1000M15G | --- | --- | |
| 2000 | ZMEL1000M20G | --- | --- | ||
| 1.96 {200} | 1500 | K(サーボモータ付) | --- | --- | ZMEL0200U15K |
| 2000 | --- | --- | ZMEL0200U20K | ||
| 4.90 {500} | 1500 | --- | ZMEL0500H15K | --- | |
| 2000 | --- | ZMEL0500H20K | --- | ||
| 9.80 {1000} | 1500 | ZMEL1000M15K | --- | --- | |
| 2000 | ZMEL1000M20K | --- | --- |
オプション
位置検出センサ追加[オプション記号:L1]
・標準品に4個の位置検出センサを備えていますが、1個のセンサを追加できます。
・より多くのセンサ追加をご希望の場合は、ご相談ください。
対応サイズ:全標準形番品
モータ電圧400V級[オプション記号:V]
・駆動用のモータの電圧を400V級に変更します。
対応サイズ:ZMEL0200U□□G, ZMEL0200U□□K, ZMEL0500H□□K, ZMEL1000M□□K
※ZMEL0500H□□G, ZMEL1000M□□Gを選定の上、モータ電圧400V級をご希望される場合はご相談ください。
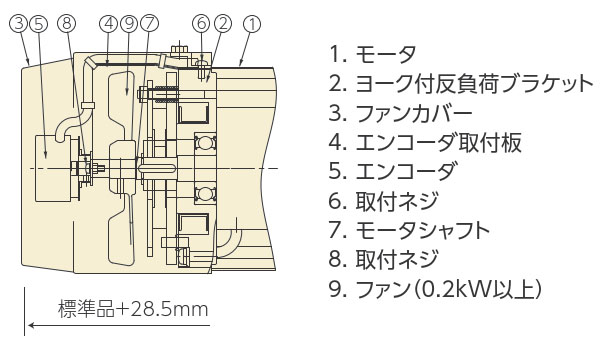
ロータリエンコーダ付[オプション記号:E]
・三相モータ付のモータ反負荷側軸端にロータリエンコーダを組込み、モータの回転信号が出力できるようになります。
対応サイズ:ZMEL0200U□□G
※ZMEL0500H□□G, ZMEL1000M□□Gを選定の上、ロータリエンコーダ付をご希望される場合はご相談ください。
特長
・制御性
減速機よりオープンコレクタ出力信号が取出せますので、さまざまな運転が可能になります。
・コンパクト
モータ軸とロータリエンコーダをカップリングで接続する必要がありません。
・コストダウン
従来の別置きと比べ、カップリング・ベースプレートやレベル合わせ作業が不要です。
ロータリエンコーダ部仕様
| 電源電圧 | DC4.5~30V |
|---|---|
| パルス数 | 100 |
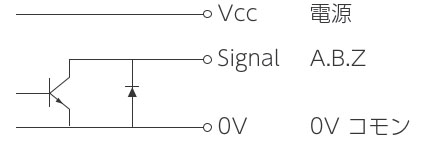
| 出力形態 | オープンコレクタ出力(NPN型)6本 AB90°位相差信号 +Z原点信号 |
| 出力回路 |
|
| 消費電流 | 30mA以下 |
| 出力電圧 | 0.5V以下(最大引き込み時) |
| 最大引き込み電流 | 40mA MAX |
| 信号立ち上がり 立ち下がり時間 |
1μs以下 |
| 最大応答周波数 | 240kHz |
| 出力回路耐圧 | 50V MAX |
| ケーブル長さ | 0.5m コネクタ付 (ヒロセ電機(株)製 DF3-6S-2C) |
| 振動 | 4.9m/s2{0.5G}以下 (20~50Hz) |
構造・寸法(ロータリエンコーダ取付部)
[クリックで拡大]
結線表
| ピンNo. | 色 | 接続 |
|---|---|---|
| 1 | 赤 | 電源 |
| 2 | 黒 | 0V コモン |
| 3 | 青 | 信号 A |
| 4 | 白 | 信号 B |
| 5 | 黄 | 信号 Z |
| 6 | 黒 | シールド |
選定
ご使用条件・ご希望条件に該当するリフタを担当者が選定します。
本ページ上部の「選定計算」のタブをクリックしてください。
ジップマスタ検討時の注意点
- ・ジップマスタは昇降速度が速いため、インバータ制御を必須とし、十分な加減速時間を設けてご使用ください。
急加速・急停止しますと停止精度の悪化やワークの振動が発生する場合があります。
据付面・アームの剛性や荷重条件により、起動停止時にジップマスタが振れる場合は加減速時間を長く取ってご使用ください。
また、振れ量を軽減させる場合はジップマスタ上部の固定をご検討ください。
- ・ジップマスタの称呼速度は最大速度です。
昇降時間を求める場合は加減速時間を含めて計算してください。
- ・さらなる昇降時間の短縮・高頻度運転・多点位置決め・連動運転などが必要な場合はサーボモータ駆動をお奨めします。
ご要望のサーボモータメーカに対応しますのでご相談ください。
- ・下降時には大きな回生電流が発生しますので、ご使用条件にもとづき十分なインバータ回生抵抗器の容量を設けてください。
回生抵抗器の容量についてはインバータメーカへご相談願います。
- ・インバータはモータに対して1枠大きい容量のご使用を推奨します。
- ・インバータトリップ時にはブレーキが作動するシーケンスを組んでください。
- ・ジップマスタは無励磁作動形ブレーキ付モータを採用しています。
サーボモータ仕様として貴社にてモータをご用意される場合はブレーキ付キー溝軸仕様を ご採用ください。
また、万が一の落下に備えお客様にて落下防止機構をご用意ください。
また、当社でも落下防止用ピンを特形対応として製作可能です。
