技術資料 減速機 DCブラシレスモータ/サーボモータ用減速機 選定
慣性モーメントの求め方
1. 回転運動体の慣性モーメント
| 運動体 | 慣性モーメント算出式 SI単位 |
GD2算出式 {重力単位} |
|
|---|---|---|---|
| 回転中心が自軸と同じ場合 | 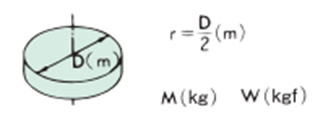 |
I=
1
2
Mr2
(kg・m2) |
GD2=
1
2
WD2 {kgf・m2} |
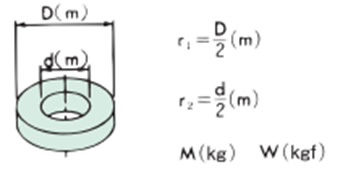 |
I=
1
2
M(r12+r22)
(kg・m2) |
GD2=
1
2
W(D2+d2) {kgf・m2} |
|
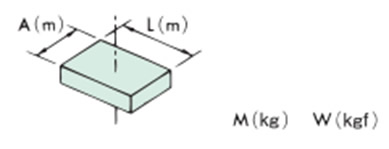 |
I=
1
12
M(A2+L2)
(kg・m2) |
GD2=
1
3
W(A2+L2) {kgf・m2} |
|
| 回転中心が自軸と異なる場合 | 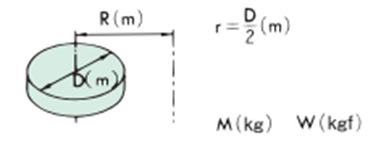 |
I=M
r2
2
+R2
(kg・m2) |
GD2=W
1
2
D2+4R2
{kgf・m2} |
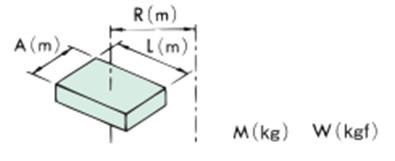 |
I=
M
4
A2+L2
3
+4R2
(kg・m2) |
GD2=W
A2+L2
3
+4R2
{kgf・m2} |
|
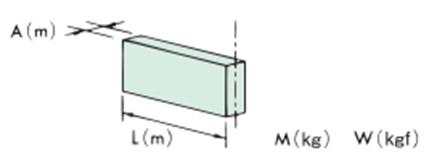 |
I=
M
12
(A2+4L2)
(kg・m2) |
GD2=
1
3
W(A2+4L2) {kgf・m2} |
2.平行運動体の相当慣性モーメント
| 運動体 | 慣性モーメント算出式 SI単位 |
GD2算出式 {重力単位} |
|---|---|---|
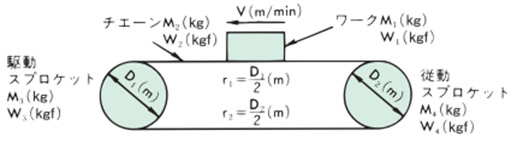 |
I=M1r12+M2r12+
M3r12+M4r22
2
(kg・m2) |
GD2=W1D12+W2D12+
W3D12+W4D22
2
{kgf・m2} |
 |
I=
1
4
(M1+M2)×
V
π n
2
(kg・m2) n:Vに対応するモータの回転速度(r/min) |
GD2=(W1+W2)×
V
π n
2
{kgf・m2} n:Vに対応するモータの回転数(r/min) |
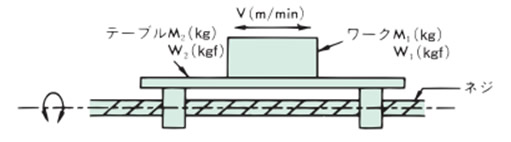
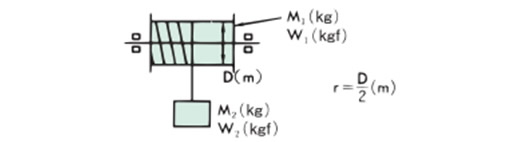 |
I=
1
2
M1r2+M2r2
(kg・m2) |
GD2=
1
2
W1D2+W2D2 {kgf・m2} |
